
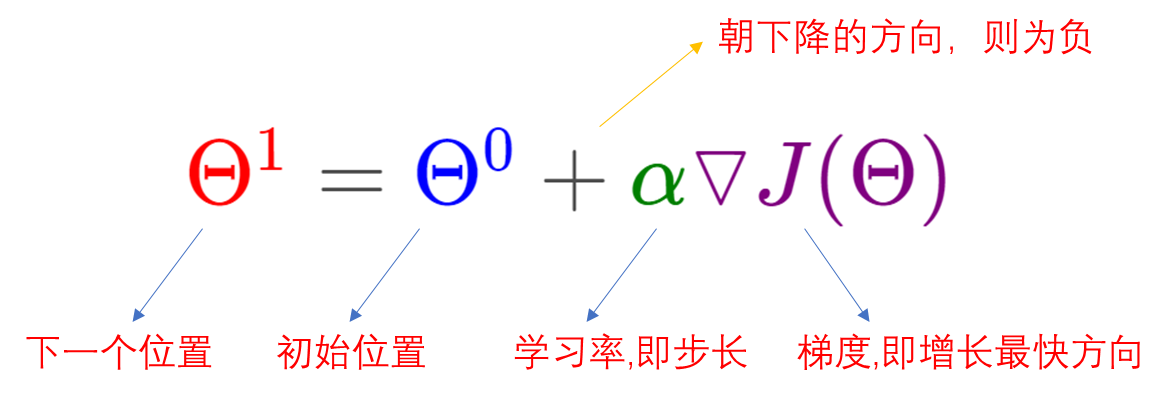
介绍: 在机器学习中应用十分的广泛,主要目的是通过迭代的方式找到目标函数的最小值(极小值)。其基本思想是:以所处的位置为基准,寻找这个位置最陡峭的地方,然后朝着下降方向走一步,然后又继续以当前位置为基准,再找最陡峭的地方,再走直到最后到达最低处。
梯度: 在单变量的函数中,梯度其实就是函数的微分,代表着函数在某个给定点的切线的斜率
在多变量函数中,梯度是一个向量,向量有方向,梯度的方向就指出了函数在给定点的上升最快的方向。下面举个例子:
数学表示:
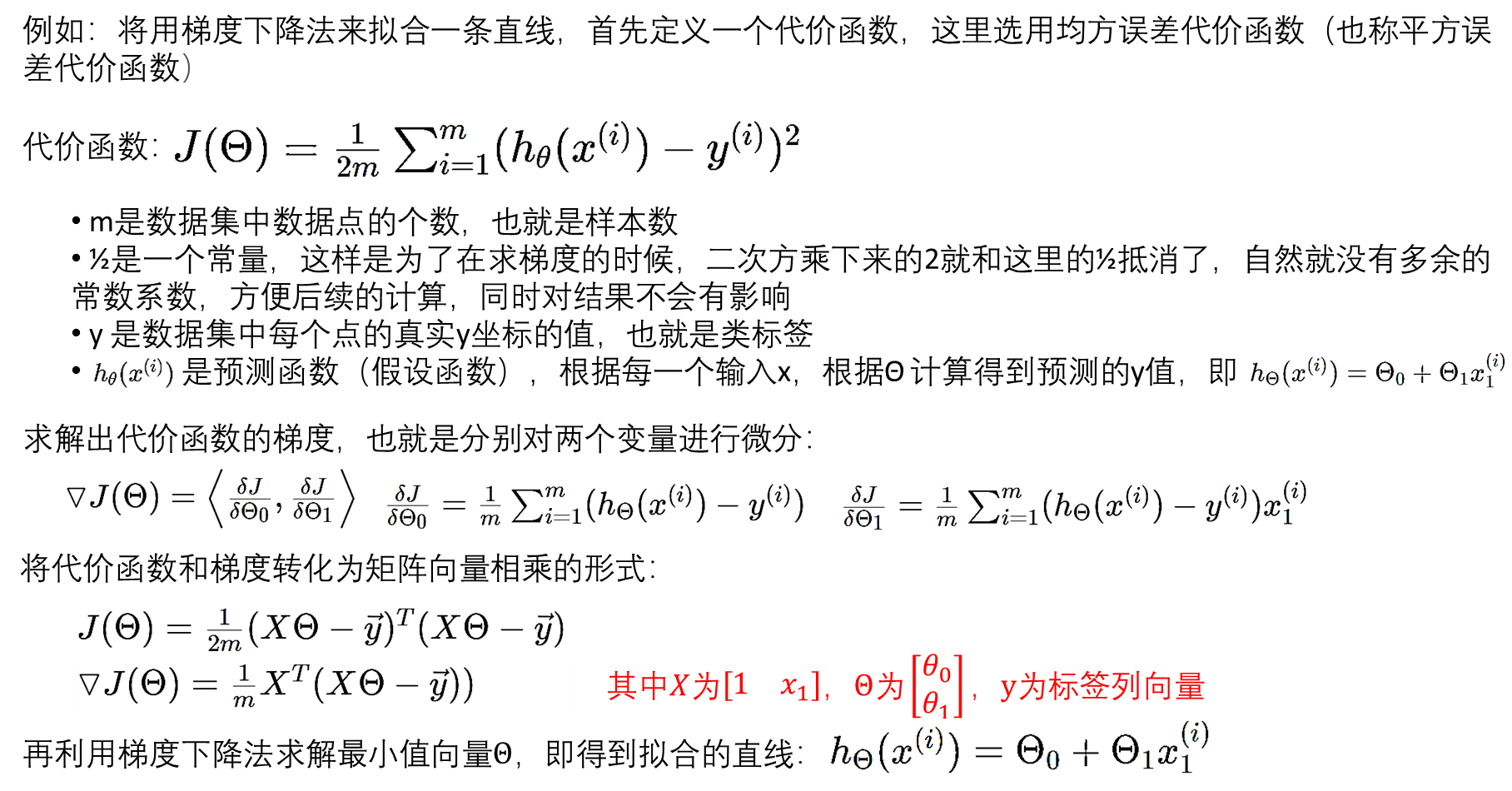
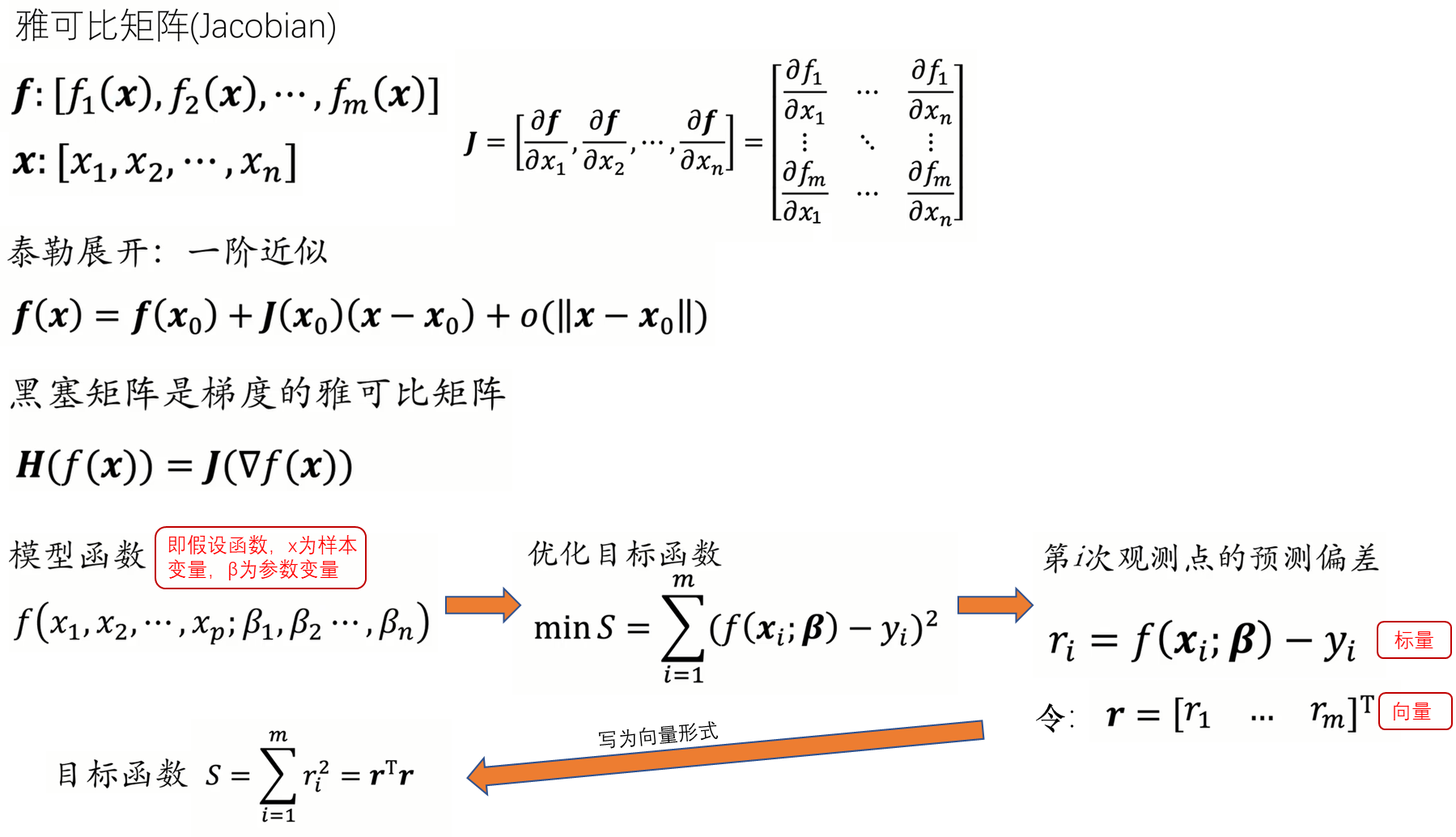
笔者注: 最优化方法最核心是求解目标函数的极值点(最大值、最小值点),可以通过建立一个代价函数,将该问题转变寻找最合适的曲线拟合点的问题(此时代价函数的极值点即为该曲线的参数)。方法如下:
参考文章:https://blog.csdn.net/qq_41800366/article/details/86583789
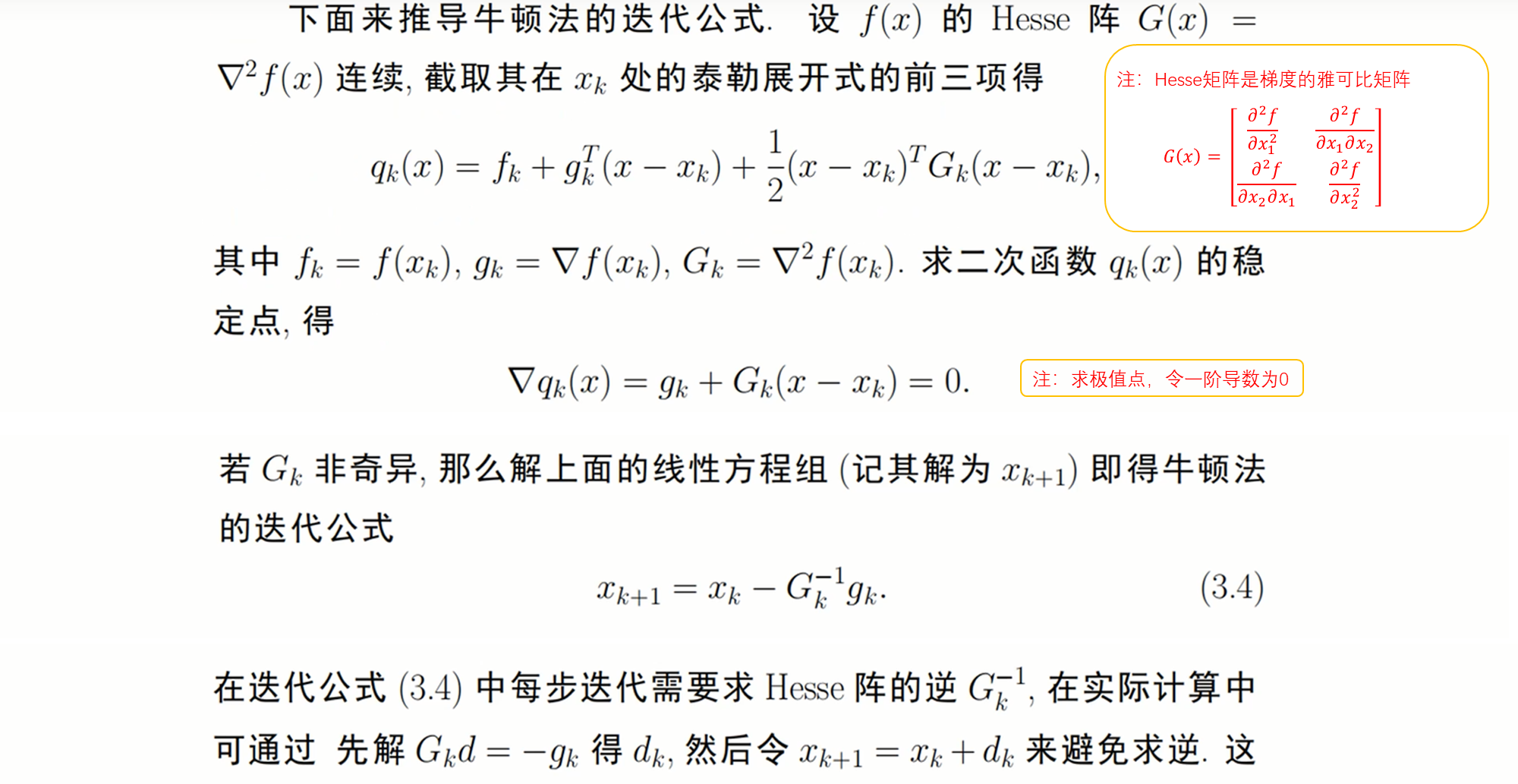
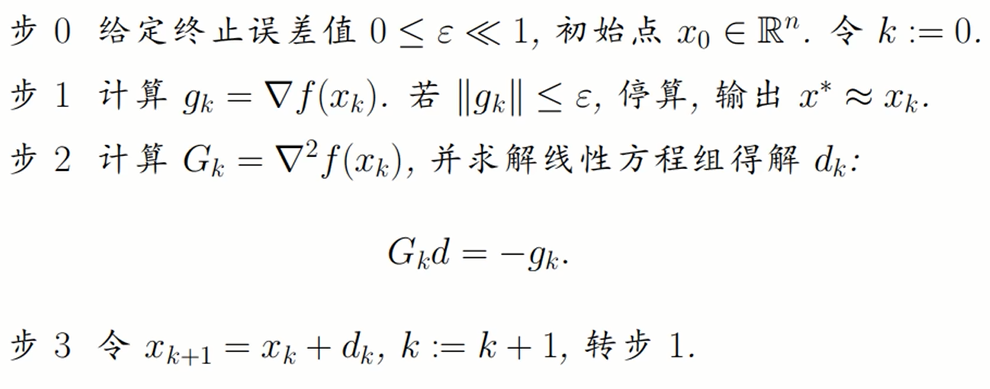
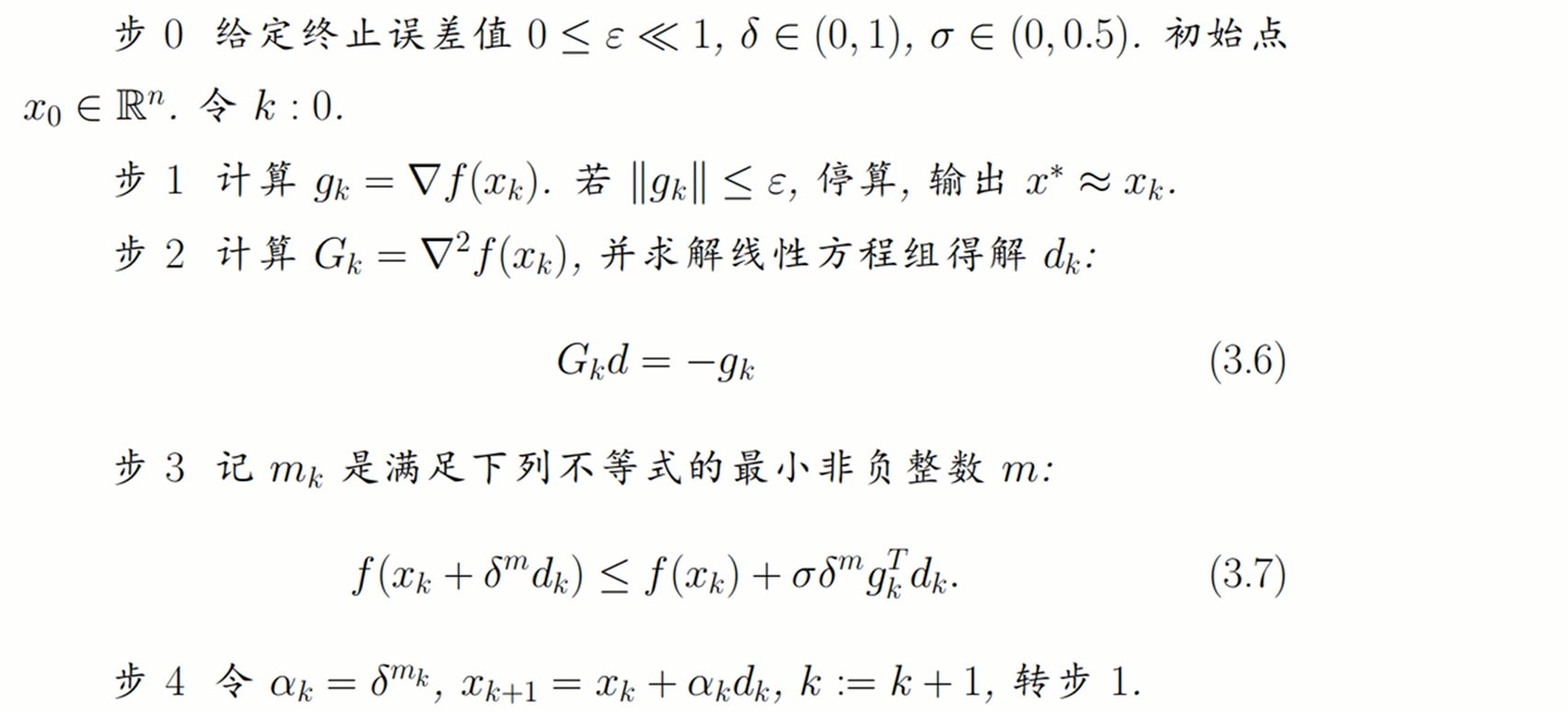
介绍: 牛顿法是求解无约束优化问题最早使用的经典方法之一,其基本思想是:用迭代点 x k x_k xk?处的一阶导数(梯度)和二阶导数(Hesse阵)对目标函数进行二次函数近似,然后把二次模型的极小值点作为新的迭代点,并不断重复这一过程,直至求得满足精确度的近似极小值点。
参考视频:https://www.bilibili.com/video/BV1AF411z7hg/?spm_id_from=333.788.recommend_more_video.1
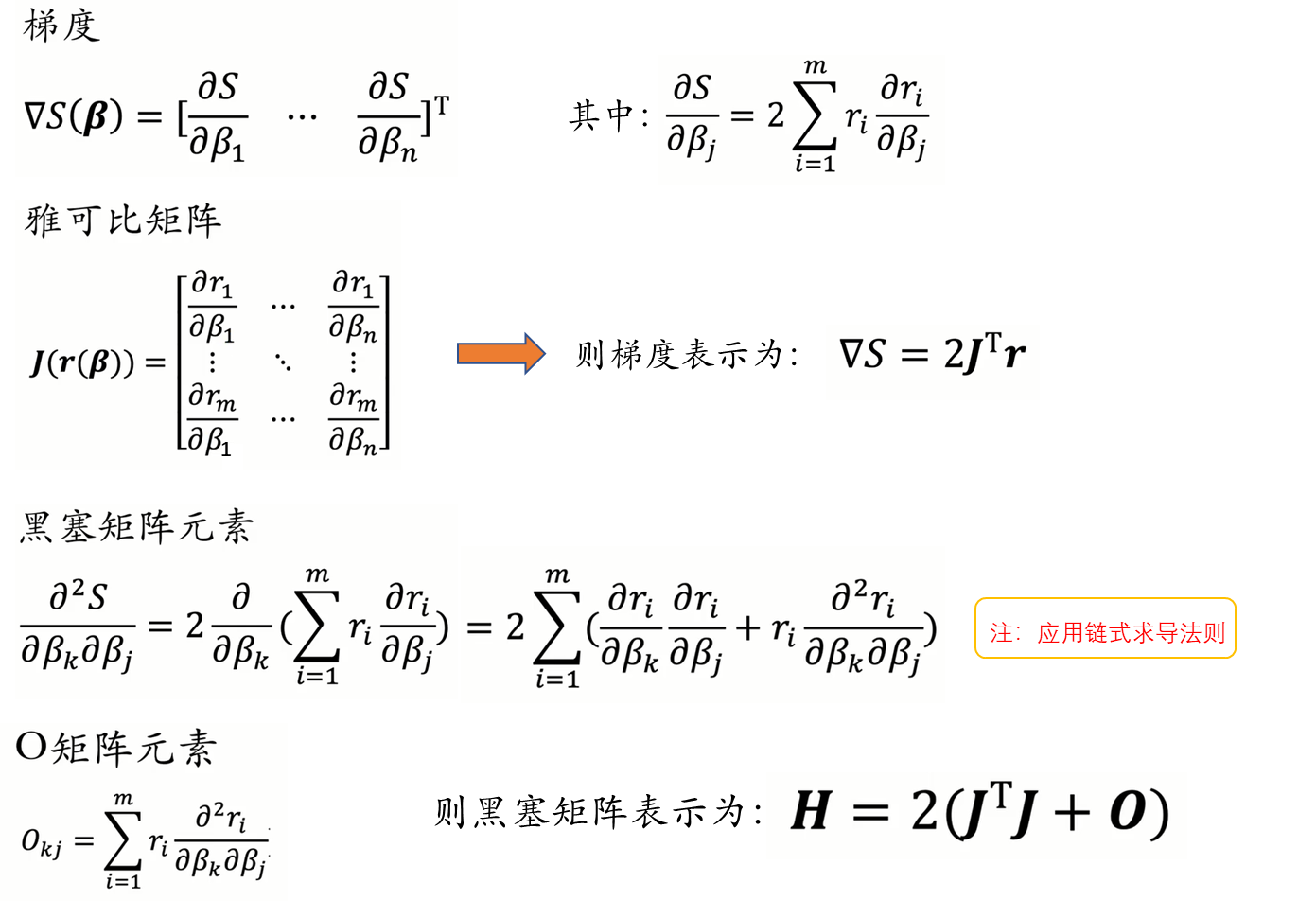
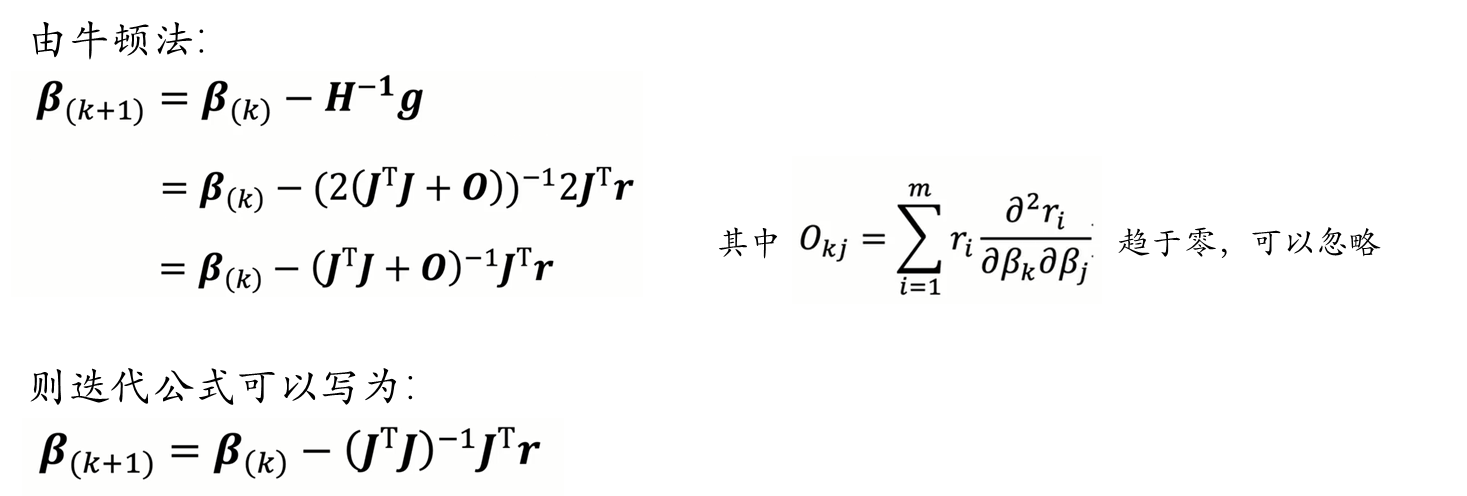
牛顿法虽然收敛速度快,但是需要计算黑塞矩阵(Hessian matrix),对于高维的问题,计算二阶导数会很复杂。因此我们有了Gauss-Newton算法。Gauss-Newton算法不直接计算黑塞矩阵(Hessian matrix),而是通过雅各比矩阵(Jacobian matrix ) 对 黑塞矩阵(Hessian matrix) 进行拟合:
H
≈
J
T
J
H \approx J ^TJ
H≈JTJ
但是,用 雅各比矩阵(Jacobian matrix )拟合黑塞矩阵(Hessian matrix),所计算出来的结果不一定是正定的,即无法保证下降,所以要引入一个对角矩阵与之相加(如果有特征值为负,加上
μ
μ
μ后就修正为正值):
H
≈
J
T
J
+
μ
I
H≈J^ T J+μI
H≈JTJ+μI
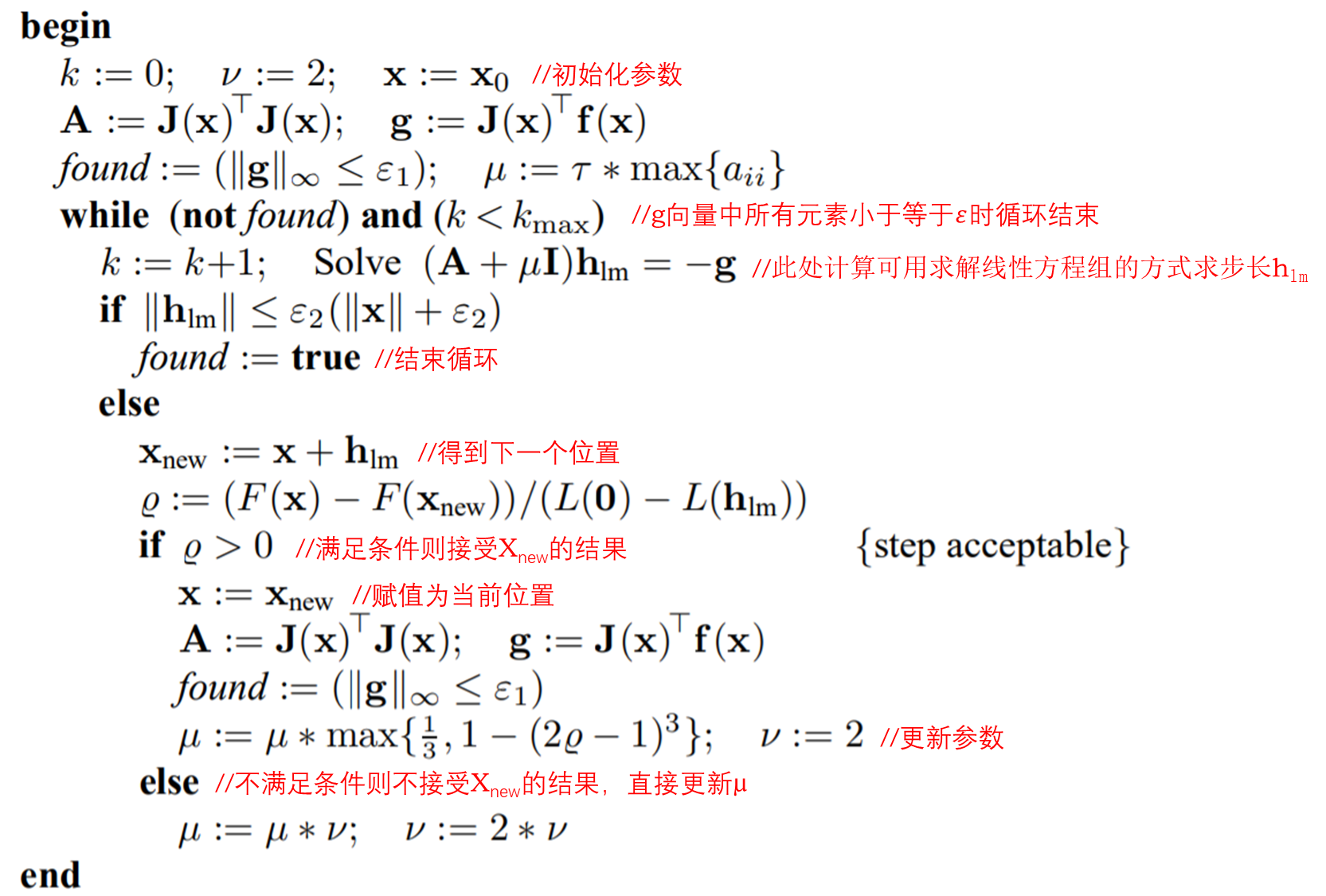
这也就得到了LM算法,将上述式子带入之前的公式,可以得到:
x
k
+
1
=
x
k
?
(
J
k
T
J
k
+
μ
I
)
?
1
g
k
x_{k+1} =x_k ?(J_k^T J _k +μI)^{?1} g_k
xk+1?=xk??(JkT?Jk?+μI)?1gk?
所以我们发现,当
μ
\mu
μ接近于0时,这个算法近似于Gauss-Newton算法;当
μ
μ
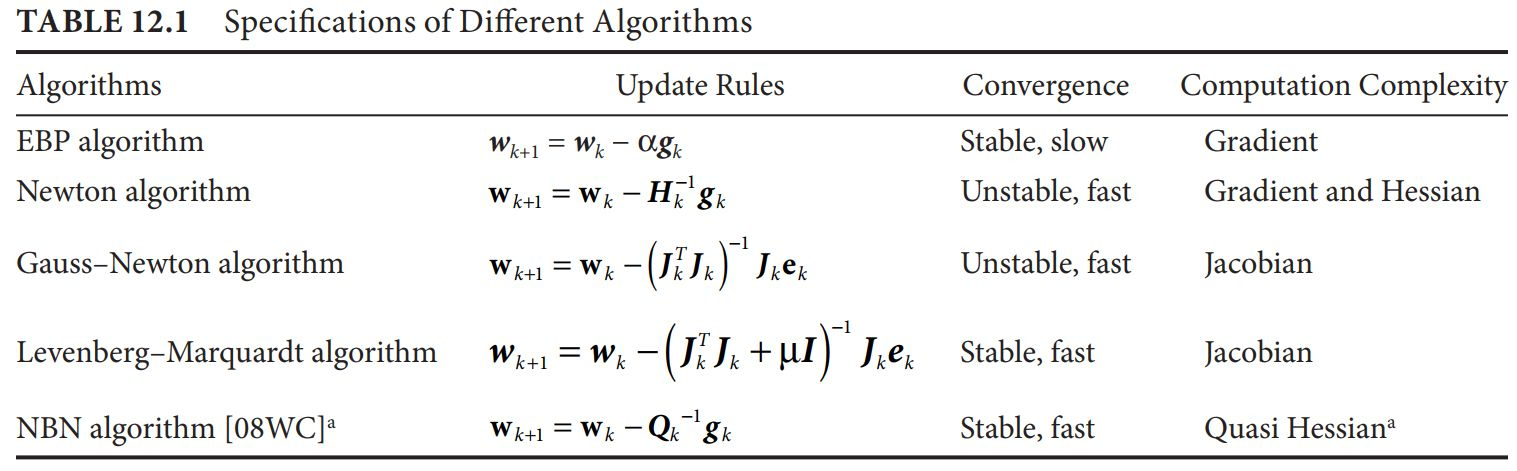
μ很大时,这个算法近似于最速下降法。因此,这也是为什么LM算法称为Gauss-Newton算法与最速下降法的结合。用一张图表示几种算法之间的关系:
电话:13988888888
传 真:海南省海口市
手 机:0898-66889888
邮 箱:88889999
地 址:/public/upload/system/2018/07/28/2091301cca30ff8c6fd3ecd09c8d4b02.jpg

